Difference between revisions of "2015 Summer Project Week:LightWeightRobotIGT"
From NAMIC Wiki
| Line 3: | Line 3: | ||
Image:FiniteStateMachine_colored.png|Finite state machine which can be operated using Slicer Module | Image:FiniteStateMachine_colored.png|Finite state machine which can be operated using Slicer Module | ||
Image:ScreenshotLWRIGT.jpg|Screenshot of the Slicer module and the current robot position in CT data of the Femur phantom | Image:ScreenshotLWRIGT.jpg|Screenshot of the Slicer module and the current robot position in CT data of the Femur phantom | ||
| + | Image:StatemachineColoring.jpg|Color coding for the robot state | ||
</gallery> | </gallery> | ||
Revision as of 08:42, 22 June 2015
Home < 2015 Summer Project Week:LightWeightRobotIGT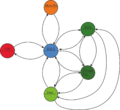
Finite state machine which can be operated using Slicer Module

Screenshot of the Slicer module and the current robot position in CT data of the Femur phantom

Color coding for the robot state




Key Investigators
- Sebastian Tauscher, Leibniz Universitaet Hannover, Institute of Mechatronic Systems
- Junichi Tokuda, Brigham and Women's Hospital, SPL
Project Description
Objective
- The LightWeightRobotIGT [1] module allows to communicate with a light weight robot (LWR iiwa, KUKA Laboratories GmbH, Germany, Augsburg) using an open interface concept based on the OpenIGTLink protocol (LWROpenIGTIF). Therefore, a state machine example is available at Git Hub containing the necessary interface classes for the communication on the robot control.
Approach, Plan
During the project week the definition of virtaul fixtures and the definition of the target point via fiducials is planned.
- Definition of virtual fixtures via 2 points
- Definition of target point and target orientation