Difference between revisions of "2016 Winter Project Week/Projects/CryoPlanningSlicerModule"
From NAMIC Wiki
| (6 intermediate revisions by 2 users not shown) | |||
| Line 2: | Line 2: | ||
<gallery> | <gallery> | ||
Image:PW-MIT2016.png|link=2016_Winter_Project_Week#Projects|[[2016_Winter_Project_Week#Projects|Projects List]] | Image:PW-MIT2016.png|link=2016_Winter_Project_Week#Projects|[[2016_Winter_Project_Week#Projects|Projects List]] | ||
| + | Image:CryoModuleGUI.jpg|CryoPlanning Module GUI | ||
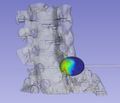
| + | Image:CryoModuleOutput1.jpg|Iceball and Tumor models | ||
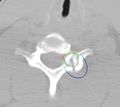
| + | Image:CryoModuleOutput2.jpg|Distance model | ||
| + | Image:CryoModuleOutput3.jpg|Distance labelmap | ||
<!-- Use the "Upload file" link on the left and then add a line to this list like "File:MyAlgorithmScreenshot.png" --> | <!-- Use the "Upload file" link on the left and then add a line to this list like "File:MyAlgorithmScreenshot.png" --> | ||
</gallery> | </gallery> | ||
| Line 13: | Line 17: | ||
==Project Description== | ==Project Description== | ||
{| class="wikitable" | {| class="wikitable" | ||
| + | ! style="text-align: left; width:27%" | Objective | ||
| + | ! style="text-align: left; width:27%" | Approach and Plan | ||
| + | ! style="text-align: left; width:27%" | Progress and Next Steps | ||
|- style="vertical-align:top;" | |- style="vertical-align:top;" | ||
| − | + | | | |
| − | <!-- | + | <!-- Objective bullet points --> |
* The objective of this project is to refine the CryoPlanning module that has been developed to plan cryotherapy procedures | * The objective of this project is to refine the CryoPlanning module that has been developed to plan cryotherapy procedures | ||
*Specifically, I will be working on the optimization algorithm to estimate the optimal pose of the ice ball to ensure complete overlap of the ice ball with the tumor while avoiding critical structures. | *Specifically, I will be working on the optimization algorithm to estimate the optimal pose of the ice ball to ensure complete overlap of the ice ball with the tumor while avoiding critical structures. | ||
| − | + | | | |
| − | |||
<!-- Add a bulleted list of key points --> | <!-- Add a bulleted list of key points --> | ||
* The plan will be to implement the Broyden-Fletcher-Goldfarb-Shannon (BGFS) optimization algorithm. The pseudo Hessian will be generated to ensure fast and robust convergence for estimation of the optimal pose of the ice ball. | * The plan will be to implement the Broyden-Fletcher-Goldfarb-Shannon (BGFS) optimization algorithm. The pseudo Hessian will be generated to ensure fast and robust convergence for estimation of the optimal pose of the ice ball. | ||
* If suboptimal performance is obtained using the BGFS algorithm (either slow or inaccurate estimation of the optimal pose), we will implement the simulated annealing optimization algorithm. | * If suboptimal performance is obtained using the BGFS algorithm (either slow or inaccurate estimation of the optimal pose), we will implement the simulated annealing optimization algorithm. | ||
| − | + | | | |
| − | |||
<!-- Fill this out at the end of Project Week; describe what you did this week and what you plan to do next --> | <!-- Fill this out at the end of Project Week; describe what you did this week and what you plan to do next --> | ||
* We have developed a module in Slicer that helps plan the position and orientation of the ice ball for cryotherapy. | * We have developed a module in Slicer that helps plan the position and orientation of the ice ball for cryotherapy. | ||
| Line 30: | Line 35: | ||
*The user has the choice of three different ice probes - ice ball, ice rod and ice sphere. | *The user has the choice of three different ice probes - ice ball, ice rod and ice sphere. | ||
* Given the ice ball and the tumor model, the amount of overlap and the distance between the two models can be computed and displayed to the interventionist. | * Given the ice ball and the tumor model, the amount of overlap and the distance between the two models can be computed and displayed to the interventionist. | ||
| − | * Automatic estimation of the optimal position and orientation of the ice ball has to be | + | * Automatic estimation of the optimal position and orientation of the ice ball based on BGFS optimization algorithm has been completed. |
| + | * The parameters of the algorithm have to be optimized since the output is dependent on the choice of initial parameters | ||
|} | |} | ||
==Background and References== | ==Background and References== | ||
<!-- Use this space for information that may help people better understand your project, like links to papers, source code, or data --> | <!-- Use this space for information that may help people better understand your project, like links to papers, source code, or data --> | ||
Latest revision as of 13:38, 8 January 2016
Home < 2016 Winter Project Week < Projects < CryoPlanningSlicerModule
CryoPlanning Module GUI

Iceball and Tumor models
Distance model
Distance labelmap





Key Investigators
- Jayender Jagadeesan, BWH
- Steve Pieper, BWH
- Sandy Wells, BWH
Project Description
| Objective | Approach and Plan | Progress and Next Steps |
|---|---|---|
|
|
|