Difference between revisions of "6DOF Electromagnetic Tracker Construction HOWTO"
From NAMIC Wiki
| Line 35: | Line 35: | ||
* The poor-accuracy poses can be reduced, by replacing the three-orthogonal-coil receiver with a receiver comprising four colocated coils (the transmitter remains three orthogonal coils). The four receiver coils point in the directions of the vertices of a regular tetrahedron. When the four-coil receiver is positioned on a transmitter-coil axis, with one receiver coil oriented parallel to a transmitter-coil axis, the remaining three receiver coils' axes cannot be parallel to transmitter-coil axes. | * The poor-accuracy poses can be reduced, by replacing the three-orthogonal-coil receiver with a receiver comprising four colocated coils (the transmitter remains three orthogonal coils). The four receiver coils point in the directions of the vertices of a regular tetrahedron. When the four-coil receiver is positioned on a transmitter-coil axis, with one receiver coil oriented parallel to a transmitter-coil axis, the remaining three receiver coils' axes cannot be parallel to transmitter-coil axes. | ||
| − | * Three transmitter coils times three receiver coils, gives nine coil-coupling measurements. These can be performed sequentially, partially sequentially and partially simultaneously, or all simultaneously. Sequential measurements simplify the electronics, but impair dynamic accuracy: When the receiver is moving, sequential measurements result in inconsistent datasets, leading to position and orientation dynamic errors | + | * Three transmitter coils times three receiver coils, gives nine coil-coupling measurements. These can be performed sequentially, partially sequentially and partially simultaneously, or all simultaneously. Sequential measurements simplify the electronics, but impair dynamic accuracy: When the receiver is moving, sequential measurements result in inconsistent datasets, leading to position and orientation dynamic errors. |
| − | * Receiver coil signals can be measured in | + | * Receiver coil signals can be measured in simultaneously or sequentially. Sequential measurements simplify electronics. Simultaneous measurements improves signal-to-noise ratio and dynamic accuracy. |
* Early designs used one operating frequency, driving the transmitter coils sequentially. Use of one frequency eliminates frequency-dependent effects. | * Early designs used one operating frequency, driving the transmitter coils sequentially. Use of one frequency eliminates frequency-dependent effects. | ||
| Line 49: | Line 49: | ||
* The transmitter-coil currents must be measured. The currents vary slowly due to coil heating, so currents can be measured periodically. | * The transmitter-coil currents must be measured. The currents vary slowly due to coil heating, so currents can be measured periodically. | ||
| − | * Some designs use DC pulses to drive the transmitter coils, instead of AC frequencies. This simplifies driver design, but makes receiver signal recovery more difficult. | + | * Some designs use DC pulses to drive the transmitter coils, instead of AC frequencies. This simplifies driver design, but makes receiver signal recovery more difficult. Pulse-driven transmitter coils must be driven sequentially. |
| − | * Data-acquisition electronics measures the currents in the three transmitter coils, and measures the voltages induced in the three receiver coils | + | * Data-acquisition electronics measures the currents in the three transmitter coils, and measures the voltages induced in the three receiver coils. |
| − | * 24-bit audio ADCs | + | * 24-bit audio ADCs have enough dynamic range to avoid the need for gain-switching. |
| − | * Avoid gain switching, as the ratios of the gain states are not precisely-enough known. | + | * Avoid gain-switching, as the ratios of the gain states are not precisely-enough known. |
* A six-ADC electronics can measure three transmitter-coil currents and three receiver-coil voltages continually and simultaneously. | * A six-ADC electronics can measure three transmitter-coil currents and three receiver-coil voltages continually and simultaneously. | ||
Revision as of 16:27, 13 December 2015
Home < 6DOF Electromagnetic Tracker Construction HOWTOA basic 6DOF (six degrees of freedom: three of position and three of orientation) electromagnetic tracker contains the following parts:
- Transmitter contains three colocated orthogonal coils. The coils are approximated as magnetic dipoles.
- Receiver contains three colocated orthogonal coils. the coils are approximated as dipoles.
- Media:EM_tracker_classic_coil_trio.jpg Photo of classic coil trio used as transmitter or receiver. The three coils are wound on a black plastic cube about one centimeter on a side.
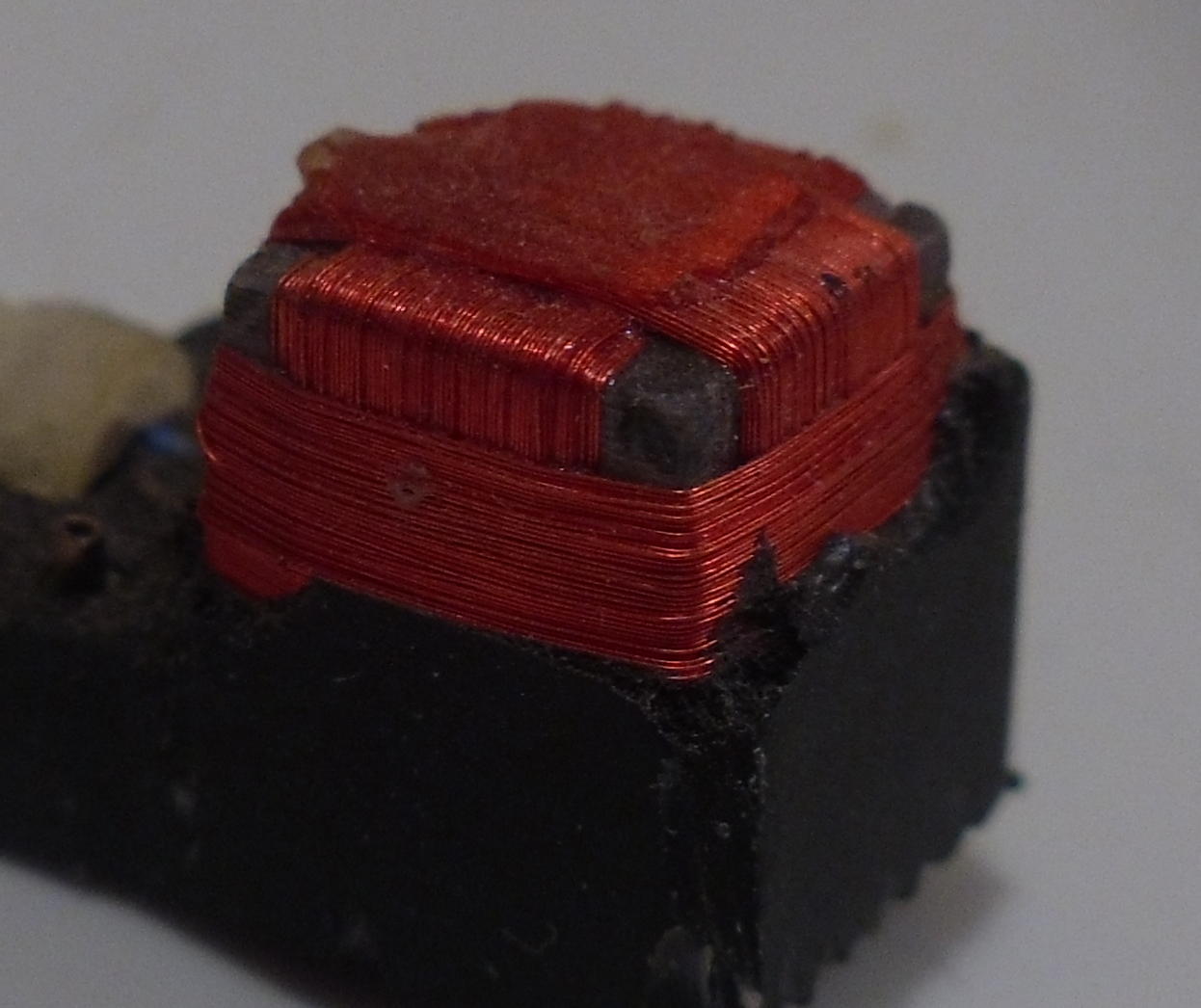{kind=link}
- Each component of HFLuxPerIMeasured is the magnetic flux through one receiver coil (due to magnetic field H from transmitter coil), divided by the current I in one transmitter coil. HFLuxPerIMeasured has units of meters, and is a geometrical property of the coils' sizes, shapes, number of turns, ferromagnetic core (if any), positions, and orientations.
- Algorithm software converts HFluxPerIMeasured to estimated receiver position and orientation, using direct-solution algorithm in Raab's 1981 paper or iterative solution in Raab etal's 1979 paper.
- Frederick H. Raab, "Quasi-Static Magnetic-Field Technique for Determining Position and Orientation", IEEE Transactions on Geoscience and Remote Sensing, Vol. GE-19, No. 4, October 1981, pages 235-243, describes closed-form algorithm for concentric-dipole coil trios.
- Frederick H. Raab, Ernest B. Blood, Terry O. Steiner, Herbert R. Jones, "Magnetic Position and Orientation Tracking System", IEEE Transactions on Aerospace and Electronic Systems, Vol. AES-15, No. 5, September 1979, pages 709-718, describes iterative algorithm for concentric-dipole coil trios, using small-angle approximation for changes in position and in orientation. Useful for sensitivity analyses.
- File:Dry0097.c is a simulator program containing an implementation of Raab's algorithm.
- The software which calculates position and orientation from HFluxPerI measurements, is an example of realtime embedded computational electromagnetics.
- There is an inherent hemisphere ambiguity, since receiver at position = (Xo,Yo,Zo) and receiver at position = (-Xo,-Yo,-Zo) show identical HFluxPerIMeasured for identical orientations. This ambiguity can be resolved by using additional transmitter or receiver coils spaced away from the colocated transmitter or receiver coils.
- The receiver is normally kept on one side of the transmitter, to avoid the hemisphere ambiguity.
- The transmitter field on the unused side of the transmitter, can be eliminated by using a magnetic mirror: Reference expired U.S. patent 5,640,170, which references many older expired EM-tracker patents.
- Accuracy is poor for lined-up pose: receiver positioned on a transmitter-coil axis, with receiver oriented to make receiver-coil axes parallel with transmitter-coil axes. Some of the first-order partial derivatives go to zero in these cases, causing the position-and-orientation solution to separate into four separate partial solutions.
- Poses with poor tracking accuracy, should be good for coil characterization. Coil-characterization poses should be chosen based on electromagnetic theory, rather than on mechanical measurements. Use receiver positions close to transmitter, based on boundary-condition principles of EM theory. Receiver positions on both sides of transmitter (even if only one side is used in operation), are necessary to distinguish transmitter gain from transmitter nonconcentricity.
- The poor-accuracy poses can be reduced, by replacing the three-orthogonal-coil receiver with a receiver comprising four colocated coils (the transmitter remains three orthogonal coils). The four receiver coils point in the directions of the vertices of a regular tetrahedron. When the four-coil receiver is positioned on a transmitter-coil axis, with one receiver coil oriented parallel to a transmitter-coil axis, the remaining three receiver coils' axes cannot be parallel to transmitter-coil axes.
- Three transmitter coils times three receiver coils, gives nine coil-coupling measurements. These can be performed sequentially, partially sequentially and partially simultaneously, or all simultaneously. Sequential measurements simplify the electronics, but impair dynamic accuracy: When the receiver is moving, sequential measurements result in inconsistent datasets, leading to position and orientation dynamic errors.
- Receiver coil signals can be measured in simultaneously or sequentially. Sequential measurements simplify electronics. Simultaneous measurements improves signal-to-noise ratio and dynamic accuracy.
- Early designs used one operating frequency, driving the transmitter coils sequentially. Use of one frequency eliminates frequency-dependent effects.
- Multiple-frequency designs drive the three transmitter coils with sinewaves at three distinct frequencies.
- Operating frequencies are typically 30 Hz to 15000 Hz. 1000 Hz, 1300 Hz, and 1600 Hz are a good starting point. Higher frequencies give higher induced voltages, lower frequencies reduce error-causing eddy-current effects.
- The transmitter coils are usually series tuned with capacitors.
- The transmitter-coil currents must be measured. The currents vary slowly due to coil heating, so currents can be measured periodically.
- Some designs use DC pulses to drive the transmitter coils, instead of AC frequencies. This simplifies driver design, but makes receiver signal recovery more difficult. Pulse-driven transmitter coils must be driven sequentially.
- Data-acquisition electronics measures the currents in the three transmitter coils, and measures the voltages induced in the three receiver coils.
- 24-bit audio ADCs have enough dynamic range to avoid the need for gain-switching.
- Avoid gain-switching, as the ratios of the gain states are not precisely-enough known.
- A six-ADC electronics can measure three transmitter-coil currents and three receiver-coil voltages continually and simultaneously.
- Add three more ADCs for each additional receiver coil trio.
- A four-ADC electronics can use one channel to measure the currents periodically over time (The currents change slowly as the transmitter coils warm up.), and three channels to measure the three voltages continually and simultaneously.
- A single-ADC electronics can measure the currents and voltages sequentially, but this gives poor dynamic performance due to inconsistent data sets.
- The receiver coil voltages must be measured simultaneously if dynamic accuracy is needed. Sequential voltage measurements give inconsistent data sets, which are hard to interpolate between. This is analogous to the interlace artifacts seen in digital television.
- HFluxPerI is the magnetic flux Hflux through the receiver coil (due to magnetic field H generated by the transmitter coil), divided by the current I through the transmitter coil.
- If the measurements are inconsistent, the algorithm will make compensating errors in both position and orientation, attempting to minimize the total error. The HFluxPerI's are less than a factor of two away from being unable to separate position and orientation, even with fully accurate and consistent measurements.
- Signal-processing software converts the current and voltage measurements into measurements of the HFluxPerI coupling from each transmitter coil to each receiver coil. This gives a 3x3 matrix HFluxPerIMeasured for three-coil transmitter and three-coil receiver. This gives 3x4 or 4x3 matrix for three-coil transmitter and four-coil receiver.
- C. L. Dolph, "A current distribution for broadside arrays which optimizes the relationship between beam width and sidelobe level," Proc. IRE, Vol. 35, pp. 335-348, June, 1946. The original Dolph-Chebyshev window article. This window is capable of 140 dB rejection of out-of-band signals.
- Albert H. Nuttall, "Some Windows with Very Good Sidelobe Behavior", IEEE Transactions on Acoustics, Speech, and Signal Processing 29 (1) 84-91, February 1981, doi:10.1109/TASSP.1981.1163506, "U.S. Government work not subject to U.S. copyright". The window in Figure 10 of this paper is (for symmetrical limits |t|<=L/2): w(t) = (1/L)(10/32 + 15/32 cos(2pi t/L) + 6/32 cos(4pi t/L) + 1/32 cos(6pi t/L)), and is zero for all t outside the L/2 limits. The sidelobe peak four DFT bins from the central peak is 91 dB down from the central peak. This window function and its first through fifth derivatives are all continuous for all t, giving 42 dB/octave rolloff of sidelobes.
- Each component of HFLuxPerIMeasured is the H flux through one receiver coil, divided by the current I in one transmitter coil. HFLuxPerIMeasured has units of meters, and is a geometrical property of the coils' sizes, shapes, number of turns, positions, and orientations.
Much elaboration and extension is needed to give high accuracy with high convenience, but the above is the basic idea.
For example, expired U.S. Patent 4,109,199 describes the use of a calibration coil in the receiver to calibrate the gains of the electronics.
More elaborate algorithms provide higher accuracy at the expense of much more computation. by modeling the non-dipole and/or non-concentric parts of the coils. Expired U.S. Patent 5,307,072 is an early example.
- C.A. Nafis, V. Jensen, L. Beauregard, P.T. Anderson, "Method for estimating dynamic EM tracking accuracy of Surgical Navigation tools", SPIE Medical Imaging Proceedings, 2006, reports low-cost accuracy-testing methods using a known-flat nonmagnetic surface (such as a granite surface plate).
- A 6DOF tracker using four-coil printed-circuit transmitter and receiver (optimized for academic originality) is discussed in: Peter Traneus Anderson, "A Source of Accurately Calculable Quasi-Static Magnetic Fields", dissertation presented to the Faculty of the Graduate College of the University of Vermont, October 2001, stored here as three files: Media:AndersonPeterDissertation.pdf is the main body. Media:AndersonPeterDissertationReadme.pdf contains copyright license, additional comments, and four figures that are blank in the main body. Media:AndersonPeterDissertationFig14r1.jpg is the color original photo of two of the figures.
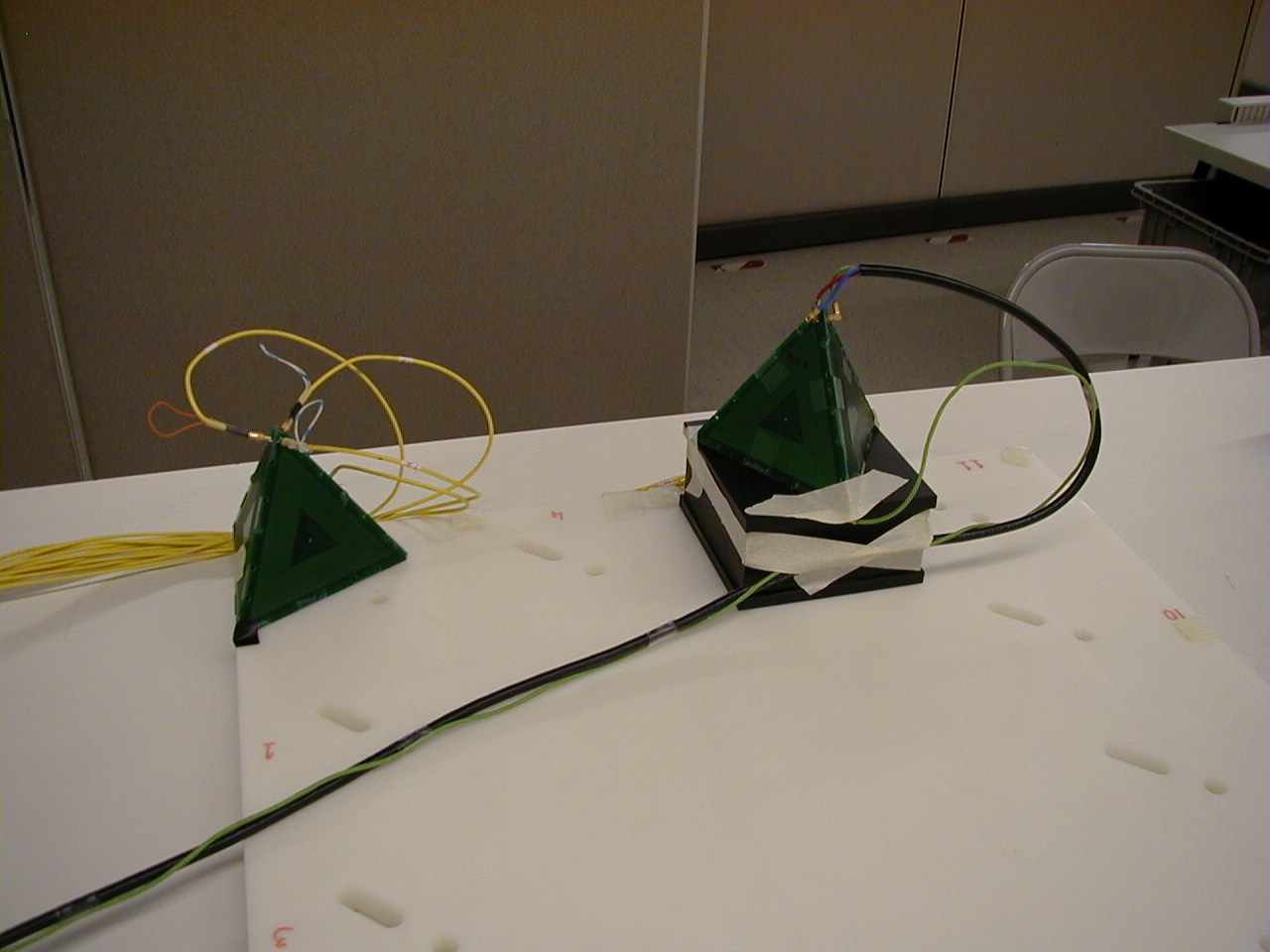{kind=link}