Difference between revisions of "2010 Summer Project Week Prostate Intervention"
From NAMIC Wiki
| Line 2: | Line 2: | ||
<gallery> | <gallery> | ||
Image:PW-MIT2010.png|[[2010_Summer_Project_Week#Projects|Projects List]] | Image:PW-MIT2010.png|[[2010_Summer_Project_Week#Projects|Projects List]] | ||
| − | |JHU's MRI-compatible needle insertion robot in 3T MRI Scanner | + | Image:MIT2010_BRP.jpg|JHU's MRI-compatible needle insertion robot in 3T MRI Scanner |
</gallery> | </gallery> | ||
| − | + | ||
==Key Investigators== | ==Key Investigators== | ||
Revision as of 14:08, 25 June 2010
Home < 2010 Summer Project Week Prostate Intervention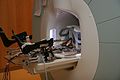
JHU's MRI-compatible needle insertion robot in 3T MRI Scanner


Key Investigators
- Queen's University: Tamas Ungi
- Haiying Liu: BWH
- Junichi Tokuda: BWH
- Sam S. Song: JHU
Objective
Develop an MR-compatible needle placement manipulator for MR-guided prostate intervention.
Approach, Plan
We will perform a mock needle biopsy and brachytherapy using the new device at Brigham and Women's Hospital. 3D Slicer is used for planning, guidance and robot control. This is a continued work from 2009 Project Week.
Progress
- We performed Mock therapy in 3T MRI Scanner at Brigham and Women's Hospital
- Fix problem in sharing z-frame registration data among 3D Slicer and the robot
- Fix registration error caused by changed z-frame geometry
Delivery Mechanism
This work will be delivered to the NA-MIC Kit as a (please select the appropriate options by noting YES against them below)
References
- DiMaio S.P., Fischer G.S., Haker S.J., Hata N., Iordachita I., Tempany C.M., Kikinis R., Fichtinger G. A system for MRI-guided Prostate Interventions. Proceedings of IEEE RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics 2006 Feb.
- Fischer G.S., Iordachita I., Csoma C., Tokuda J., Mewes P.W., Tempany C.M., Hata N., Fichtinger G. Pneumatically Operated MRI Compatible Needle Placement Robot for Prostate Interventions. Proceedings of the IEEE International Conference on Robotics and Automation 2008;2489-2495.
- Mewes P., Tokuda J., DiMaio S., Fischer G., Csoma C., Gobbi D., Tempany C., Fichtinger G., Hata N. Integrated System for Robot-Assisted in Prostate Biopsy in Closed MRI Scanner. Proceedings of the IEEE International Conference on Robotics and Automation 2008; 2959-2962.
- Fischer G.S., Iordachita I., Csoma C., Tokuda J., DiMaio S.P., Tempany C.M., Hata N., Fichtinger G. MRI-Compatible Pneumatic Robot for Transperineal Prostate Needle Placement. IEEE/ASME Transactions on Mechatronics June 2008; 13(3):295-305.
- Tokuda J., Fischer G.S., Csoma C., DiMaio S.P., Gobbi D.G., Fichtinger G., Tempany C.M., Hata N. Software Strategy for Robotic Transperineal Prostate Therapy in Closed-Bore MRI. Int Conf Med Image Comput Comput Assist Interv. 2008;11(Pt 2):701-709. PMID: 18982666.